
Research
BaSeNET: A Learning-based Mobile Manipulator Base Pose Sequence Planning for Pickup Tasks
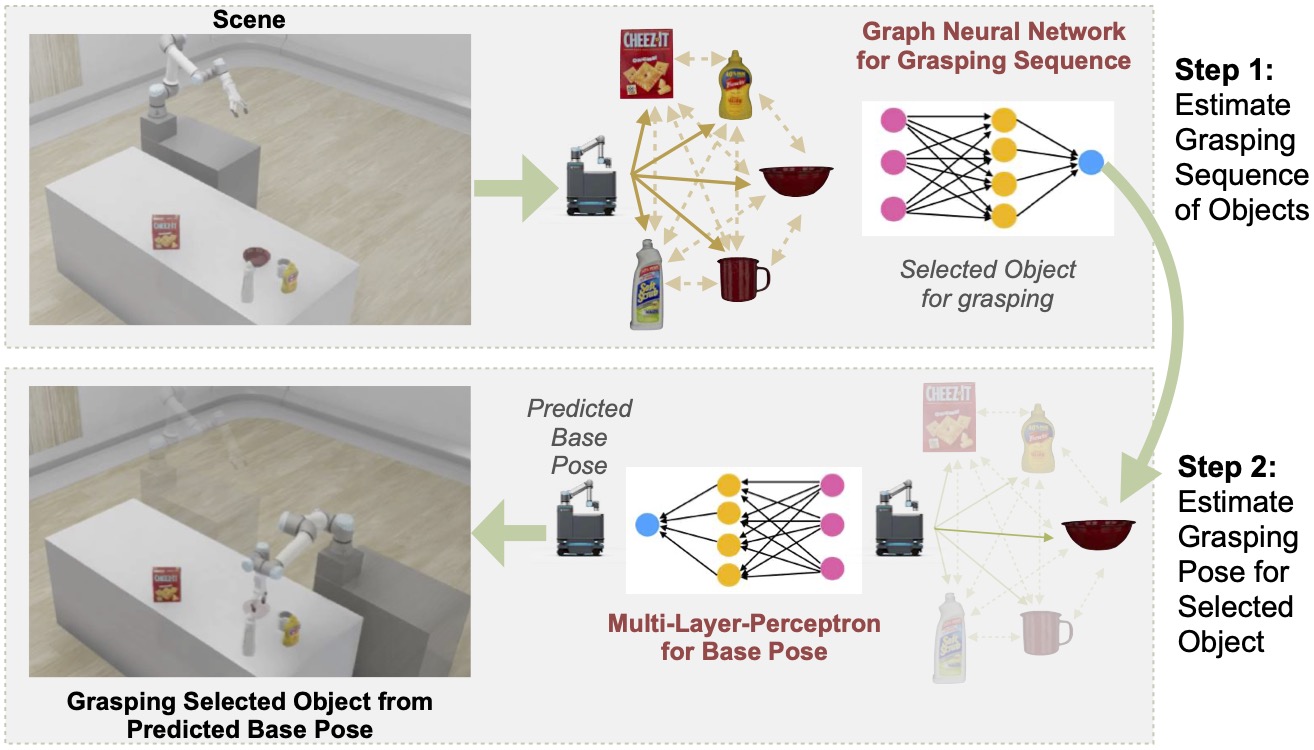
We present BaSeNET: a learning-based approach to plan the sequence of base poses for grasping objects on mobile robots.
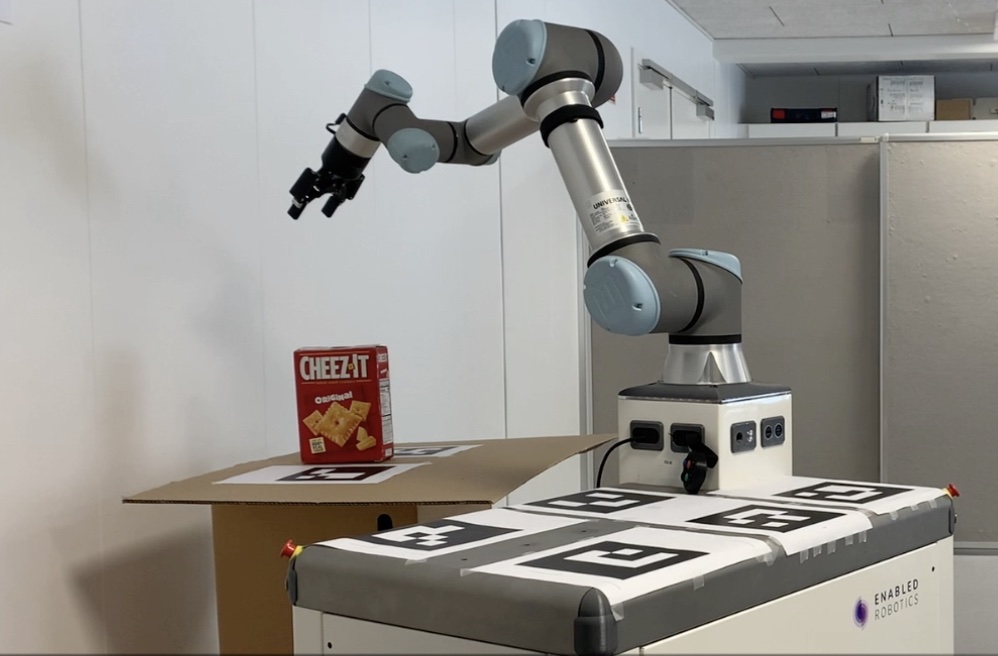
Pre-grasp approaching on mobile robots
In this research, we explored the use of a pre-active approach to determine a suitable base pose and pre-grasp manipulator configuration for grasping on mobile robots.
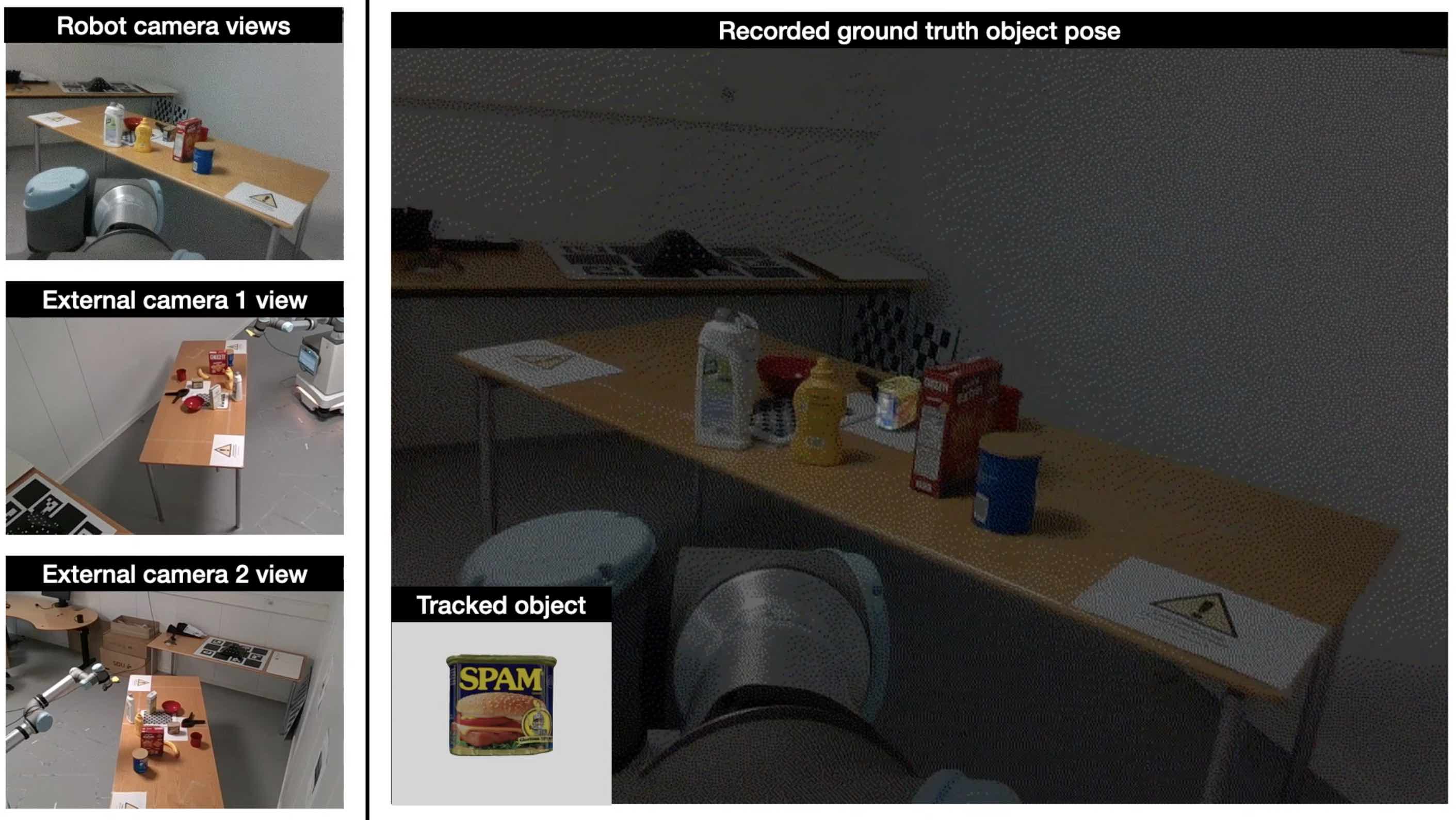
Multi-view YCB object pose tracking dataset for Mobile Manipulation
We released a Multi-view YCB object pose tracking dataset for Mobile Manipulation (MY-MM) with views of the objects from the robot's eye-in-hand and external cameras in the environment.
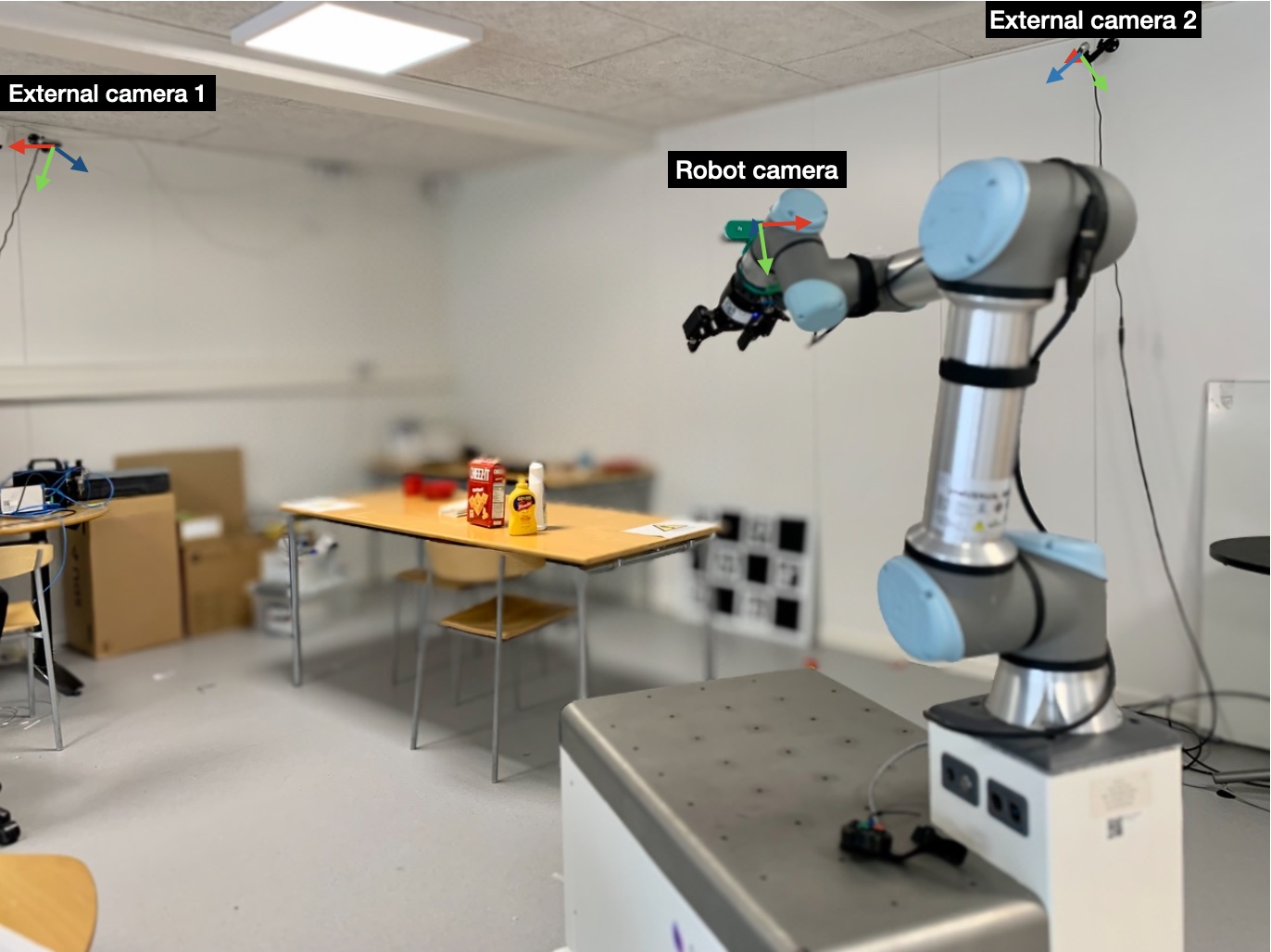
Multi-view object pose distribution tracking
We developed multi-view object pose distribution tracking framework for pre-grasp planniong on mobile robots

Distributed agency in HRI
We explored the use of distributed agency on mobile care robots using a prototype of the Plant Watering Robot

An interactive drink serving robot
We designed and implemented an interactive service robot capable of seamless deployment in real-world environments, coupled with high social acceptance.
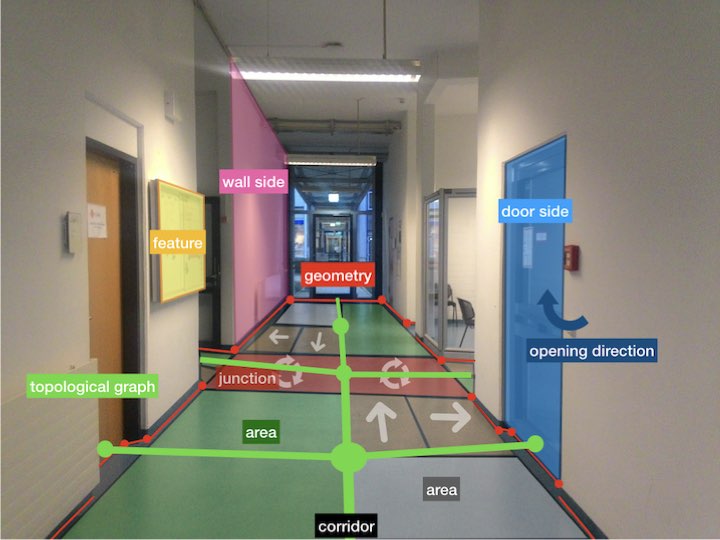
Semantic world modelling and indoor navigation using OpenStreetMap
We explored how digital navigation maps such as OpenStreetMap can be used for indoor robot navigation